

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی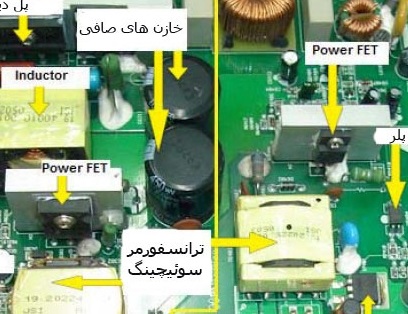 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
عنوان مقاله فارسی: کنترل ردیابی مسیر شبکه عصبی تطبیقی مبتنی بر ناظر برای خودروی عملیاتی از راه دور
عنوان مقاله لاتین: Observer-Based Adaptive Neural Network Trajectory Tracking Control for Remotely Operated Vehicle
نویسندگان: Zhenzhong Chu; Daqi Zhu; Simon X. Yang
تعداد صفحات: 12
سال انتشار: 2017
زبان: لاتین
Abstract:
This paper focuses on the adaptive trajectory tracking control for a remotely operated vehicle (ROV) with an unknown dynamic model and the unmeasured states. Unlike most previous trajectory tracking control approaches, in this paper, the velocity states and the angular velocity states in the body-fixed frame are unmeasured, and the thrust model is inaccurate. Obviously, it is more in line with the actual ROV systems. Since the dynamic model is unknown, a new local recurrent neural network (local RNN) structure with fast learning speed is proposed for online identification. To estimate the unmeasured states, an adaptive terminal sliding-mode state observer based on the local RNN is proposed, so that the finite-time convergence of the trajectory tracking error can be guaranteed. Considering the problem of inaccurate thrust model, an adaptive scale factor is introduced into thrust model, and the thruster control signal is considered as the input of the trajectory tracking system directly. Based on the local RNN output, the adaptive scale factor, and the state estimation values, an adaptive trajectory tracking control law is constructed. The stability of the trajectory tracking control system is analyzed by the Lyapunov theorem. The effectiveness of the proposed control scheme is illustrated by simulations.
مبلغ قابل پرداخت 15,000 تومان
برچسب های مهم





