

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی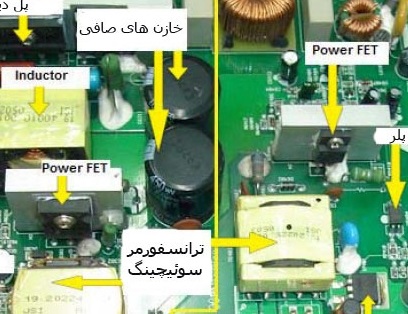 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود پروژه پياده سازی کنترل مد لغزشی فازی تطبيقی روی سيستم روبات سيار چرخ دار
تعداد صفحات: 92
فرمت: word
در سالهای اخير کنترل کننده های مد لغزشی بسيار مورد تحقيق و بررسی قرار گرفته اند.
اما تعيين سطح لغزش مناسب و غلبه بر مشکل Chattering از جمله مهمترين عوامل محدود کننده استفاده از اين روش کنترلی هستند. برای حل اين مشکل روشهای متعددی ارائه شده است.
يکی از اين روشها، ترکيب کنترل کننده مد لغزشی با مفاهيم فازی و تطبيقی است.
در اين پايان نامه برای کنترل يک روبات سيار از کنترل فازی- تطبيقی همراه با مد لغزشی استفاده شده است. بدين ترتيب که ابتدا مدل ديناميکی سيستم استخراج شده است. سپس براساس اين مدل، کنترل کننده مد لغزشی طراحی ميشود. نتايج حاصل از اين کنترل کننده نشان می دهد که سيگنال کنترلی رفتار نامطلوبی دارد.
در صورت استفاده از کنترل کننده فازی- تطبيقی نيز مشاهده ميشود که پاسخ سيستم در لحظات اوليه حرکت مطلوب نيست و برای تطبيق کامل قوانين فازی زمان زيادی لازم است.
در نهايت کنترل کننده فازی- تطبيقی همراه با مد لغزشی طراحی ميشود که نتايج حاصل از آن بيانگر رفتار مناسب سيستم از لحاظ زمان پاسخ دهی و شکل سيگنال کنترلی است.
چكيده...................................................................................................١
مقدمه...................................................................................................
٢ فصل اول: آليات.....................................................................................
طرح موضوع................................................................................٤
1-٢- ساختار فصول................................................................................٥
فصل دوم: سيستم های فازی و تطبيقی..........................................................
-١- مقدمه ...........................................................................................٧
2-٢- سيستم های فازی............................................................................٧
٢ -٢-١- فازی سازها ..............................................................................١٢
٢ -٢-٢- پايگاه قواعد فازی.......................................................................١٤
٢ -٢-٣- موتور استنتاج فازی .....................................................................١٥
٢ -٢-٤- غيرفازی ساز ............................................................................١٧
٢ -٣-کنترل کننده های تطبيقی ....................................................................١٩
٢ -٤- سيستم های تطبيقی...........................................................................٢١
٢ -٥- چه زمانی از کنترل تطبيقی استفاده بايد کرد...........................................٢٢
٢ - ٦- ساختار کنترل کننده های تطبيقی ........................................................٢٢
٢ -٧ -انواع کنترل تطبيقی: مستقيم و غير مستقيم .............................................٢٣
٢ -٧-١-کنترل تطبيقی غير مستقيم ..............................................................٢٣
٢ -٧-٢- کنترل تطبيقی مستقيم ...................................................................٢٤
٢ -٨ - ساختارهای کنترل تطبيقی.................................................................٢٥
٢ -٨-١- جدول بندی بهره..........................................................................٢٦
٢ -٨-٢- کنترل کننده های تطبيقی مدل مرجع..................................................٢٦
٢ -٨-٣- رگولاتورهای خود تنظيم ...............................................................٢٧
٢ -٩- مشکل کنترل تطبيقی و مزيت آن.........................................................٢٩
٢ -١٠ - سيستم های فازی تطبيقی.................................................................٢٩
٢ -١١ - مزيت کنترل کننده فازی-تطبيقی نسبت به کنترل کننده تطبيقي رايج............٣٠
2-١٢ - جمع بندی....................................................................................٣٢
فصل سوم: کنترل کننده مد لغزشی ..............................................................٣
٤٣ -١- مقدمه ...........................................................................................٣٥
3-٢- مسائل مقدماتي در مورد آنترل آننده هاي ساختار متغير.............................٣٦
٣ -٣- مختصري از تاريخ آنترل ساختار متغير...............................................٣٩
٣ -٤- نامعينی.........................................................................................٤١
٣ -٥- معرفی کنترل کننده مد لغزشی ............................................................٤٣
٣ -٦- سطح هاي لغزشي ...........................................................................٤٥
٣ -٧- روند طراحي آنترل آننده مدلغزشي.....................................................٤٥
٣ -٧-١- آنترل مدلغزشي سيستم هاي خطي.....................................................٤٥
٣ -٧-٢- طراحي آنترل آننده مدلغزشي براي سيستمهای غيرخطي ......................٤٨
٣ -٧-٢-١- روند طراحی کنترل کننده مد لغزشی در دو مرحله............................٥٠
٣ -٧-٢-٢- تقريب پيوسته از قانون کنترلي.....................................................٥٣
٣ -٨- نوسانات فرآانس بالا در آنترل آننده مدلغزشي.......................................٥٤
٣ -٩- معايب استفاده از کنترل کننده مد لغزشی................................................٥٥
٣ -١٠ - کنترل فازی مد لغزشی ...................................................................٥٦
3-١١ - جمع بندی....................................................................................٥٧
فصل چهارم: پياده سازی کنترل کننده مد لغزشی مد لغزشی - فازی ....................
.٥٨٤ -١- مدل ديناميکی روبات سيار چرخ دار....................................................٥٩
4-٢- طراحی کنترل کننده مد لغزشی ...........................................................٦١
٤ -٣- کنترل مد لغزشی فازی – تطبيقی.........................................................٦٨
٤ -٤- عملکرد سيستم فازی – تطبيقی ...........................................................٧١
٤ -٥- کنترل فازی- تطبيقی به همراه کنترل مد لغزشی......................................٧٣
٤ -٦- جمع بندی......................................................................................٧٦
فصل پنجم: نتيجه گيری و پيشنهادات آينده ....................................................٧٧
مراجع..................................................................................................٧٩
مبلغ قابل پرداخت 25,000 تومان
برچسب های مهم





