

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی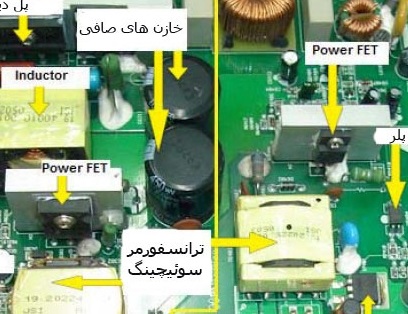 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود پروژه طراحی كنترل كننده های هوشمند PID برای سيستم چند متغيره غيرخطی
تعداد صفحات: 143
فرمت: Word
در اين پروژه به طراحي كنترل كننده هوشمند PID براي سيستمهاي چند متغيره پرداخته مي- شود. نخست، يك سيستم خبره براي طراحي و تنظيم كنترل كننده هاي PID يك ورودي- يك خروجي معرفي ميگردد. در اين روش با استفاده از آزمايش فيدبك رلهاي و روش زيگلر- نيكولز و يا با استفاده از آزمايش پاسخ پله حلقه باز، يك كنترل كننده اوليه طراحي ميشود. معمولا پاسخ به دست آمده از اين روشها، مشخصه هاي مناسبي ندارد و بايستي كنترل كننده دقيقتر تنظيم گردد. بنابراين سيستم خبره بهره هاي PID را به منظور يافتن پاسخ حلقه بسته بهتر، تغيير ميدهد. اين تنظيم كننده خبره بر اساس تشخيص الگو عمل ميكند و با به كارگيري قوانيني كه تجربيات مهندسين كنترل در آنها گنجانده شده است، تغيير بهره ها را انجام ميدهد. سيستم خبره نيازي به مدل فرآيند ندارد و مراحل مختلف طراحي و تنظيم كنترل كننده، بر اساس مشاهده خروجي فرآيند انجام ميگردد. سپس اين سيستم خبره به منظور طراحي و تنظيم كنترل كننده هاي PID چند متغيره متمركز و غير متمركز، تعميم داده ميشود. در نهايت، تنظيم كننده خبره بر روي سيستم هاي مختلف از جمله يك فرآيند چند متغيره غيرخطي، اعمال ميشود. نتايج به دست آمده از شبيه سازي، كارايي سيستم خبره را در طراحي و تنظيم كنترل كننده هاي PID نشان ميدهد.
فهرست مطالب
چکیده
مقدمه
فصل اول: مقدمه
۱- ۱ مقدمه…………………۲
۱- ۲ کنترل PID….ا…………..۳
۱- ۳ کنترل چندمتغیره …………………۴
۱- ۴ سیستم خبره …………….۶
۱- ۵ تنظیم کنترلکننده PID به روش خبره …………….۹
فصل دوم: طراحی کنترلکنندهPID به روش خبره برای سیستم یکورودی- یکخروجی
۲- ۱ مقدمه ………………..۱۳
۲- ۲ تعیین بهرههای اولیه……………………………۱۴
۲- ۲- ۱ روش پاسخ فرکانسی زیگلر- نیکولز………………۱۵
۲- ۲- ۲ روش زیگلر- نیکولز بهبود یافته …………..۱۶
۲- ۲- ۳ آزمایش فیدبک رلهای ……………..۱۹
۲- ۳ سیستم خبره ………………….۲۲
۲- ۳- ۱ مشخصه های پاسخ………………..۲۲
۲- ۳- ۲ تشخیص نوع پاسخ………….۲۴
۲- ۳- ۳ پایگاه قوانین ………………۳۰
۲- ۳- ۴ معیار بهینگی پاسخ………….۳۸
۲- ۴ شبیه سازی …………………………………………۳۹
فصل سوم: طراحی کنترل کننده چندمتغیره متمرکز
۳- ۱ مقدمه ……………….۵۰
۳- ۲ سیستمهای چندمتغیره …………………….۵۱
۳- ۲- ۱ کنترل چند متغیره……….۵۲
۳- ۲- ۲ آرایه های نایکوئیست و باندهای گرشگورین……………۵۵
۳- ۳ طراحی کنترلکننده PI متمرکز ………………….۵۷
۳- ۳- ۱ شرح مسأله …………….۵۸
۳- ۳- ۲ کنترلکنندهPI مقاوم …………………………..۶۰
۳- ۳- ۲-۱ کنترلکنندهP …ا………………..۶۰
۳- ۳- ۲-۲ کنترلکنندهI مقاوم …………۶۴
۳- ۳- ۲-۳ کنترل کنندهPI مقاوم …………………………….۶۵
۳- ۳- ۳ تأخیر در کنترل ……………….۶۶
۳- ۴ تنظیم کنترلکننده چند متغیره متمرکز……………………۶۸
۳- ۴- ۱ حالات خاص…………………….۷۰
۳- ۴- ۲ تعمیم حالات خاص به حالت کلی…………………….۷۲
۳- ۴- ۳ تعیین نسبتهای تنظیم…………………۷۴
۳- ۵ چگونگی تصحیح پاسخها……………………..۷۶
۳- ۶ شبیه سازی…………………………….۷۸
۳- ۷ نتیجه گیری………………………۸۱
فصل چهارم: طراحی کنترلکنندهPID به روش خبره برای سیستم چندورودی- چندخروجی
۴- ۱ مقدمه ………………..۸۳
۴- ۲ طراحی تنظیمکننده خبره………………….۸۳
۴- ۳ شبیهسازی……………………۸۵
۴- ۳- ۱ سیستم خطی ………………………………..۸۷
۴- ۳- ۲ سیستم غیرخطی چهارتانکه…………………….۹۳
۴- ۳- ۲-۱ مدل فیزیکی………………..۹۳
۴- ۳- ۲-۲ نقطه کار ………………….۹۵
۴- ۳- ۲-۳ خطی سازی …………………………۹۶
۴- ۳- ۲-۴ طراحی و تنظیم کنترلکننده PID………………………ا…۹۷
فصل پنجم: نتیجهگیری و پیشنهادات
۵- ۱ نتیجه گیری……………….۱۱۰
۵- ۲ پیشنهادات………………………..۱۱۱
منابع و ماخذ
فهرست منابع فارسی……………………۱۱۳
فهرست منابع غیر فارسی………………..۱۱۴
چکیده انگلیسی
مبلغ قابل پرداخت 20,000 تومان
برچسب های مهم





