

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی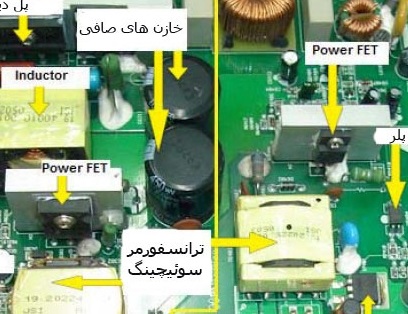 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
پروژه الگوریتم کنترل مد لغزشی تطبیقی برای ربات موازی کابلی نیمه مقید
دارای فایل توضیحات word با ۳۷ صفحه + کدهای آماده برنامه با نرم افزار Matlab
رباتهای کابلی نسل جدیدی از رباتهای موازی هستند، که اخیراً به دلیل مزایایشان مورد توجه بسیاری از محققین علم رباتیک قرار گرفتهاند.
در مقایسه با حجم زیاد پژوهشهای انجام شده در زمینه رباتهای سری و موازی، بحث کنترل رباتهای کابلی چندان مورد توجه محققین قرار نگرفته است.
در بحث کنترل این رباتها با توجه به عدم قطعیت در پارامترهای سیستم شامل جرم مجری نهایی و تغییر طول کابلها با زمان و همچنین وجود اغتشاش خارجی مانند باد و ناپایداری ذاتی سیستم باید به دنبال طراحی کنترلکننده مناسبی باشیم.
یک کنترل کننده مناسب برای مقابله با عدم قطعیتهای سیستم ربات کابلی، کنترل کننده مد لغزشی است. این کنترل کننده ویژگیهای خیلی خوبی همچون عملکرد خوب در مقابل دینامیکهای مدل نشده، عدم حساسیت به تغییر پارامترها، دفع اغتشاش خارجی و پاسخ دینامیکی سریع را دارد.
به طور معمول این کنترل کننده برای مواجهه با عدم قطعیت یا نامعینی در سیستمهای غیرخطی به کار میرود. اما این روش نیاز به اطلاع قبلی از کران بالا و کران پایین عدم قطعیتها دارد، چرا که این کرانها برای محاسبهی بهره سویچینگ کنترل کننده استفاده میشود.
بنابراین در اینجا برای پرهیز از محاسبهی کران بالای عدم قطعیتهای سیستم، یک قانون تطبیقی برای محاسبه بهره لغزشی یا بهره سویچینگ ارائه میشود. به منظور مقایسه و تحلیل عملکرد الگوریتم کنترل پیشنهادی، کنترل کننده مد لغزشی مرسوم طراحی شده و عملکرد آنها در شرایط مختلف با کنترل کننده پیشنهادی مقایسه میگردد.
همچنین با توجه به بحث پر اهمیت نیروهای کشش کابلها در رباتهای کابلی، یک راه حل ساده ریاضی برای تضمین مثبت ماندن نیروهای کشش کابلها، بر اساس پارامترهای دلخواه الگوریتم کنترلی پیشنهادی ارائه میشود. نتایج شبیه سازی الگوریتم کنترلی پیشنهادی، ویژگیهای فوق را تایید میکند.
پروژه الگوریتم کنترل مد لغزشی تطبیقی برای ربات موازی کابلی نیمه مقید
فهرست مطالب:
فصل ۱: مقدمه
۱-۱٫ مقدمهای بر رباتهای کابلی
۱-۲٫ مروری بر الگوریتمهای کنترلی رباتهای کابلی
فصل ۲: طراحی الگوریتم کنترلی برای ربات موازی کابلی ثامن
۲-۱٫ مکانیزم ربات کابلی ثامن
۲-۲٫ سینماتیک ربات کابلی ثامن
۲-۲-۱٫ سینماتیک معکوس ربات
۲-۲-۲٫ سینماتیک مستقیم ربات
۲-۳٫ دینامیک سیستم ربات کابلی ثامن
۲-۴٫ کنترل مد لغزشی (SMC)
۲-۵٫ کنترل مد لغزشی تطبیقی(ASMC)
۲-۶٫ ارائه روشی برای مثبت ماندن نیروهای کشش کابلها
۲-۷٫ نتایج شبیه سازی
۲-۷-۱٫ الف) نتایج شبیه سازی الگوریتم کنترلی پیشنهادی
۲-۷-۲٫ بررسی و تحلیل ASMC وSMC در برابر اغتشاش خارجی باد
۲-۷-۳٫ بررسی و تحلیل تغییر جرم مجری نهایی با الگوریتمهای کنترلی ASMC وSMC
۲-۸٫ نتیجه گیری
مراجع
مبلغ قابل پرداخت 35,000 تومان
برچسب های مهم





