

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق حل المسائل کتاب پلاستیسیته برای مهندسان سازه چن و هان Wai-Fah Chen
حل المسائل کتاب پلاستیسیته برای مهندسان سازه چن و هان Wai-Fah Chen دانلود حل المسائل کتاب انتقال حرارت هدایتی دیوید هان و نجاتی اوزیشیک David Hahn
دانلود حل المسائل کتاب انتقال حرارت هدایتی دیوید هان و نجاتی اوزیشیک David Hahn دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری حل المسائل کتاب کدنویسی کنترل خطا شو لین ویرایش دوم SHU LIN
حل المسائل کتاب کدنویسی کنترل خطا شو لین ویرایش دوم SHU LIN بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی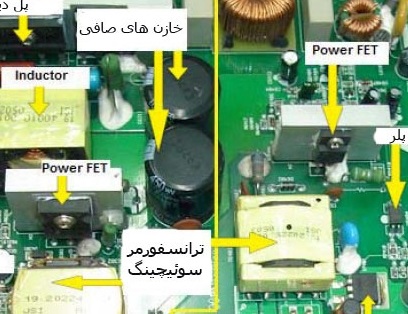 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
عنوان مقاله فارسی: یادگیری تقویتی مبتنی بر مدل برای ردیابی بهینه تقریبی افق بینهایت
عنوان مقاله لاتین: Model-Based Reinforcement Learning for Infinite-Horizon Approximate Optimal Tracking
نویسندگان: Rushikesh Kamalapurkar; Lindsey Andrews; Patrick Walters; Warren E. Dixon
تعداد صفحات: 5
سال انتشار: 2017
زبان: لاتین
Abstract:
This brief paper provides an approximate online adaptive solution to the infinite-horizon optimal tracking problem for control-affine continuous-time nonlinear systems with unknown drift dynamics. To relax the persistence of excitation condition, model-based reinforcement learning is implemented using a concurrent-learning-based system identifier to simulate experience by evaluating the Bellman error over unexplored areas of the state space. Tracking of the desired trajectory and convergence of the developed policy to a neighborhood of the optimal policy are established via Lyapunov-based stability analysis. Simulation results demonstrate the effectiveness of the developed technique.
مبلغ قابل پرداخت 15,000 تومان
برچسب های مهم





