

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی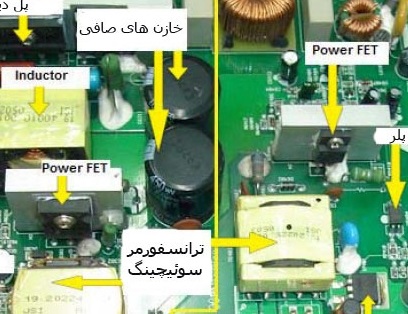 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
عنوان مقاله فارسی: شبکههای عصبی توزیعشده برای کنترل مشارکتی مانیپولتورها: دیدگاه بازی - تئوری
عنوان مقاله لاتین: Distributed Recurrent Neural Networks for Cooperative Control of Manipulators: A Game-Theoretic Perspective
نویسندگان: Shuai Li; Jinbo He; Yangming Li; Muhammad Usman Rafique
تعداد صفحات: 11
سال انتشار: 2017
زبان: لاتین
Abstract:
This paper considers cooperative kinematic control of multiple manipulators using distributed recurrent neural networks and provides a tractable way to extend existing results on individual manipulator control using recurrent neural networks to the scenario with the coordination of multiple manipulators. The problem is formulated as a constrained game, where energy consumptions for each manipulator, saturations of control input, and the topological constraints imposed by the communication graph are considered. An implicit form of the Nash equilibrium for the game is obtained by converting the problem into its dual space. Then, a distributed dynamic controller based on recurrent neural networks is devised to drive the system toward the desired Nash equilibrium to seek the optimal solution of the cooperative control. Global stability and solution optimality of the proposed neural networks are proved in the theory. Simulations demonstrate the effectiveness of the proposed method.
این مقاله کنترل سینماتیک مشارکتی بازوهای متعدد را با استفاده از شبکههای عصبی بازگشتی توزیعشده در نظر میگیرد و یک روش قابل پیگیری برای گسترش نتایج موجود در کنترل بازوهای منفرد با استفاده از شبکههای عصبی بازگشتی به سناریو با هماهنگی بازوهای متعدد فراهم میکند. مساله به صورت یک بازی محدود فرمولبندی میشود، که در آن مصرف انرژی برای هر کنترلکننده، اشباع ورودی کنترل، و محدودیتهای توپولوژیکی تحمیلشده توسط گراف ارتباطی در نظر گرفته میشوند. شکل ضمنی تعادل نش برای بازی با تبدیل مساله به فضای دوگانه آن به دست میآید. سپس، یک کنترلکننده دینامیک توزیعی براساس شبکههای عصبی بازگشتی طراحی میشود تا سیستم را به سمت تعادل نش مطلوب برای جستجوی راهحل بهینه کنترل تعاونی هدایت کند. ثبات جهانی و بهینگی راهحل شبکههای عصبی پیشنهادی در نظریه اثبات شدهاست. شبیهسازیها کارایی روش پیشنهادی را نشان میدهند.
مبلغ قابل پرداخت 15,000 تومان
برچسب های مهم





