

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی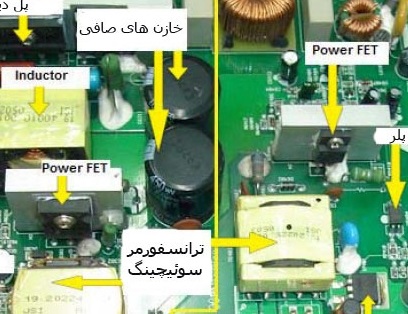 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
عنوان مقاله فارسی: یادگیری درک جهان به عنوان احتمالی یا قطعی از طریق تعامل با دیگران: یک آزمایش رباتیک عصبی
عنوان مقاله لاتین: Learning to Perceive the World as Probabilistic or Deterministic via Interaction With Others: A Neuro-Robotics Experiment
نویسندگان: Yuichi Yamashita;Hiroaki Arie;Tetsuya Ogata;Shigeki Sugano;Jun Tani
تعداد صفحات: 18
سال انتشار: 2017
زبان: لاتین
Abstract:
We suggest that different behavior generation schemes, such as sensory reflex behavior and intentional proactive behavior, can be developed by a newly proposed dynamic neural network model, named stochastic multiple timescale recurrent neural network (S-MTRNN). The model learns to predict subsequent sensory inputs, generating both their means and their uncertainty levels in terms of variance (or inverse precision) by utilizing its multiple timescale property. This model was employed in robotics learning experiments in which one robot controlled by the S-MTRNN was required to interact with another robot under the condition of uncertainty about the others behavior. The experimental results show that self-organized and sensory reflex behavior-based on probabilistic prediction-emerges when learning proceeds without a precise specification of initial conditions. In contrast, intentional proactive behavior with deterministic predictions emerges when precise initial conditions are available. The results also showed that, in situations where unanticipated behavior of the other robot was perceived, the behavioral context was revised adequately by adaptation of the internal neural dynamics to respond to sensory inputs during sensory reflex behavior generation. On the other hand, during intentional proactive behavior generation, an error regression scheme by which the internal neural activity was modified in the direction of minimizing prediction errors was needed for adequately revising the behavioral context. These results indicate that two different ways of treating uncertainty about perceptual events in learning, namely, probabilistic modeling and deterministic modeling, contribute to the development of different dynamic neuronal structures governing the two types of behavior generation schemes.
مبلغ قابل پرداخت 15,000 تومان
برچسب های مهم





