

 دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی
دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی دانلود قالب پاورپوینت مهندسی برق
دانلود قالب پاورپوینت مهندسی برق دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم
دانلود حل تمرین مقاومت مصالح بیر جانسون ویرایش هفتم دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم
دانلود حل تمرین تئوری آنتن ها بالانیس ویرایش دوم قالب پاورپوینت نگارگری
قالب پاورپوینت نگارگری دانلود حل تمرین معادلات دیفرانسیل کرایه چیان
دانلود حل تمرین معادلات دیفرانسیل کرایه چیان دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi
دانلود حل المسائل ریاضیات گسسته گریمالدی Grimaldi دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی
دانلود حل تمرین آمار و احتمالات مهندسی دکتر نعمت الهی بانک حل المسائل کتاب های دانشگاهی
بانک حل المسائل کتاب های دانشگاهی حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON
حل المسائل کتاب مکاترونیک ویلیام بولتون ویرایش ششم WILLIAM BOLTON دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART
دانلود حل المسائل کتاب الکترونیک قدرت دانیل هارت DANIEL HART حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم
حل المسائل کتاب زبان جاوا برنامه بنویسی پل دیتل و هاروی دیتل – ویرایش یازدهم دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری
دانلود رایگان نمونه سوالات استخدامی تخصصی پرستاری دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson
دانلود حل المسائل کتاب مدیریت عملیات ویلیام استیونسون ویرایش سیزدهم William Stevenson حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING
حل المسائل کتاب رفتار مکانیکی مواد نورمن دولینگ NORMAN DOWLING دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php
دانلود رایگان مجموعه ای از سورس کدهای ربات های تلگرام به زبان php حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED
حل المسائل کتاب پیشرانش هواپیما و موتورهای توربینی گازی احمد السید ویرایش اول AHMED EL-SAYED ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری
ثبت سفارش آنلاین کتاب و حل المسائل دانلود حل المسائل کتاب اصول برنامه ریزی و کنترل تولید و موجودی ها شیرمحمدی قالب پاورپوینت نگارگری دانلود حل المسائل نظریه صف محمد مدرس یزدی
دانلود حل المسائل نظریه صف محمد مدرس یزدی دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin
دانلود 60 پروژه هاي پرکاربرد PLC S7-300 دانلود حل تمرین اصول آنالیز ریاضی والتر رودین Walter Rudin دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار
دانلود حل المسائل کتاب فوتونیک بها صالح دانلود حل تمرین مدارهای الکتریکی 2 جبه دار دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین
دانلود حل المسائل مهندسی ترافیک پیشرفته مک شین دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور
دانلود حل المسائل نقشه کشی صنعتی 1 متقی پور دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم
دانلود حل المسائل ماشین های الکتریکی پی سی سن ویرایش سوم دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی
دانلود حل المسائل کتاب سیستم های صف محمدرضا ایروانی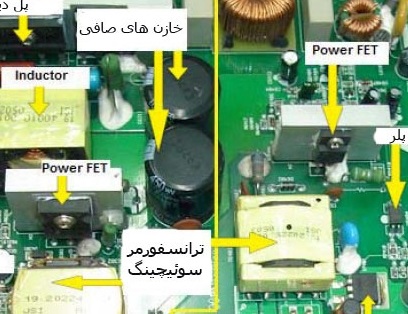 دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود کتاب آموزش تعمیر بردهای الکترونیک و عیب یابی قطعات الکترونیکی به زبان فارسی
دانلود پروژه شبيه سازی كنترل كننده مناسب به روش SVPWM براي درايو موتورهای DC بدون جاروبک
تعداد صفحات: 121
فرمت: word
موتورهاي بدون جاروبك مغناطيس دائم به خاطر خصوصياتويژهاي كه دارند به طور گسترده و به ويژه در كاربردهاي خاص استفاده مي شوند. اين موتورها بر اساس توزيع شار در فاصله هوايي به دو گروه شار سينوسي و ذوزنقه اي تقسيم مي شوند كه نوع سينوسي آن داراي ريپل گشتاور كم تر است و در كاربردهاي مرتبط استفاده مي شود. روش هاي كنترلي اين نوع را ميتوان به دو دسته اسكالر و برداري تقسيم كرد كه مهم ترين روش هاي كنترل برداري عبارتنداز FOC و DTC. در اين بين روش DTC به خاطر سادگي و حجم كمتر محاسبات آن بيشتر مورد توجه قرار گرفته است. اما با وجود سادگي روش DTCاين روش دو عيب عمده دارد. ريپل گشتاور و شار اين روش زياد است و فركانس سوئيچينگ آن ثابت نيست. براي برطرف كردن اين دو عيب، پژوه شهاي بسياري تا كنون انجام و راهكارهايي پيشنهاد شدهاند. يكي از كارآمدترين روشهايي كه تا كنون ارائه شده است، استفاده از روش SVPWM همراه با روش (DTC-SVPWM)DTC است. در روش DTC-SVPWM با استفاده از مقادير تخميني، ابتدا بردار مرجع شار پيوندي و سپس بردار ولتاژ مورد نياز براي جبران خطاي گشتاور و شار محاسبه ميشود .با استفاده از روش DTC-SVPWM ريپل گشتاور و شار پيوندي به مقدار قابل ملاحظه اي كاهش مي يابد، اما به دليل حجم زياد محاسبات اين روش، روش DTC-SVPWM در عمل با محدوديت هايي مانند محدوديت فركانس سوئيچينگ روبرو است. در اين گزارش، روشي پيشنهادي براي بهبود عملكرد روش DTC-SVPWM ارائه شده است. در روش پيشنهادي (Hystereisis-SVPWM)، از بسياري محاسبات روش DTC-SVPWMصرفنظر و از يك باند هيسترزيس براي تعيين حالت سوئيچينگ استفاده شده است. در نتيجه زمان مورد نياز براي انجام محاسبات هر سيكل سوئيچينگ كاهش و حداكثر فركانس سوئيچينگ افزايش مي يابد. همچنين به دليل كاهش تعداد تغيير حالت سوئيچينگ درهر سيكل، تلفات سوئيچينگ نيز كاهش مييابد. با توجه به نتايج شبيهسازي، نشان داده شده است كه ريپل گشتاور الكترومغناطيسي و شار پيوندي با استفاده از روش پيشنهادي در مقايسه با مقدار آن در روش DTC-SVPWM كاهش مييابد. همچنين وضعيت هارمونيكي جريان استاتور بهبود و THD آن كاهش مي يابد. با توجه به مزاياي فوق، برتري روش پيشنهادي بر روش DTC-SVPWM كاملا آشكار است.
فصل اول- مقدمه 1
فصل دوم - موتورهاي بدون جاروبك مغناطيس دائم
بررسي ساختار موتورهاي بدون جاروبك مغناطيس دائم 11
2-2- مدارمعادل موتور بدون جاروبك مغناطيس دائم 15
2-3- مدل رياضي موتور بدون جاروبك مغناطيس دائم 16
2-4- بررسي دقيقترPMSM
2-4- 1- مدل رياضي PMSM
2-4- 2- معادله هاي ولتاژ و گشتاور PMSM در دستگاه مرجع دوفاز d-q
2-4- 3- انتقال متغيرهاي ماشين بين دستگاههاي مرجع مختلف 28
2-4- 4- بررسي اصول عملكرد PMSM با استفاده از دياگرام فازوري 29
2-5- شرايط لازم براي عملكرد پايدارPMSM
2-6- برتري هاي موتورPMSMنسبت بهBLDC
2-7- بررسي مدل استفاده شده براي PMSM درشبيه سازي 34
فصل سوم – روش هاي كنترل موتورهاي بدون جاروبك مغناطيس دائم
روش كنترل موتورهاي BLDC
3-2- بررسي روشهاي كنترليPMSM
3-2- 1- كنترل اسكالر 43
43 كنترل ولت-هرتز
كنترل برداري 44
44 كنترل شارگرا (FOC)
كنترل مستقيم گشتاور (DTC)
روش DSVM
DTC-SVPWM روش
3-3- مباني روشDTC
3-3- 1- كنترل شار در روش DTC براي موتور PMSM
3-3- 2- الگوريتم انتخاب بردارهاي ولتاژ در روش DTC
3-3- 3- بررسي ساختار كنترلكننده DTC
تخمين گر شار و گشتاور
مزاياو معايب روشDTC
3-5- بررسي وتحليل روشDTC-SVPWM
3-5- 1- اصول روش SVPWM براي كنترل اينورتر DTC-SVPWM
3-5- 3- بررسي ساختار مورد استفاده در روش DTC-SVPWM
حلقه كنترل سرعت 73
كنترل كننده گشتاور 74
بلوك محاسبه گر
بردار مرجع شار پيوندي (RFVC) 76
بلوك كنترل كننده اينورتر
فصل چهارم
روش پيشنهادي براي بهبود عملكرد روش DTC-SVPWM
4-1- ساختار روش پيشنهادي 78
4-2- الگوريتم بلوك كنترل كننده اينورتر در روش DTC-SVPWM
4-3- الگوريتم بلوك كنترل كننده اينورتردر روش پيشنهادي 81
4-4- مقايسه الگوريتم سوئيچينگ روش پيشنهادي با روش DTC-SVPWM
4-4- 1- حجم محاسبات 83
4-4- 2- تلفات سوئيچينگ84
فصل پنجم - شبيه سازي و نتايج
گشتاورالكترومغناطيسي88
5-2- شارپيوندي 90
5-3- زاويه شارپيوندي وشار روتور 92
5-4- سرعت مكانيكي روتور 93
5-5- جريان استاتور 94
5-6- مولفه هاي شارپيوندي درراستاي محورهايDوQ
فصل ششم- نتيجه گيري و پيشنهادها
نتيجه گيري
مبلغ قابل پرداخت 25,000 تومان
برچسب های مهم





